Coming up
TBD
..

I am a PhD candidate at Prof. Schoellig’s lab at Technical University of Munich. My main interests include control for complex systems, reinforcement learning, and robotics. Previously, I completed a M.Sc. degree in Robotics at TUM, and wrote my master’s thesis with Prof. Ijspeert. I was at Robert Bosch GmbH and in the Formula Student. Member of AI Grid. Podcast at Labs Talk.
C++ Controllers, Python Interfaces, and Gymnasium environments for teleoperation and deploying learning-based policies on manipulators.
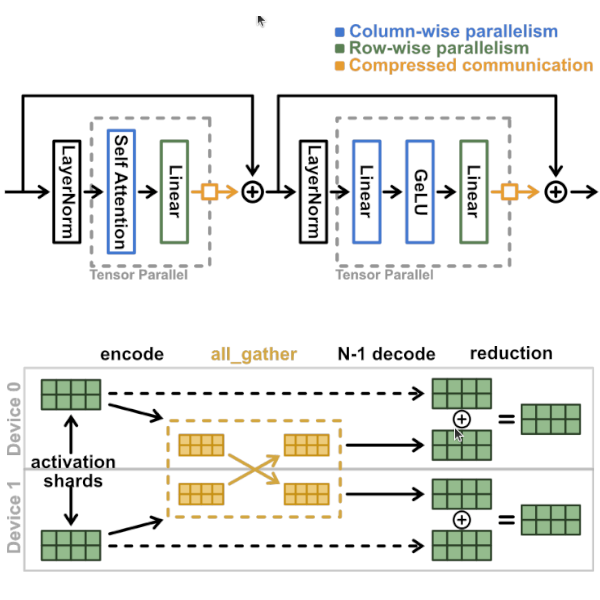
Inter-GPU communication compression for Large Language Models leads to up to 2x reduction of time-to-first-token with negligible model performance degradation.
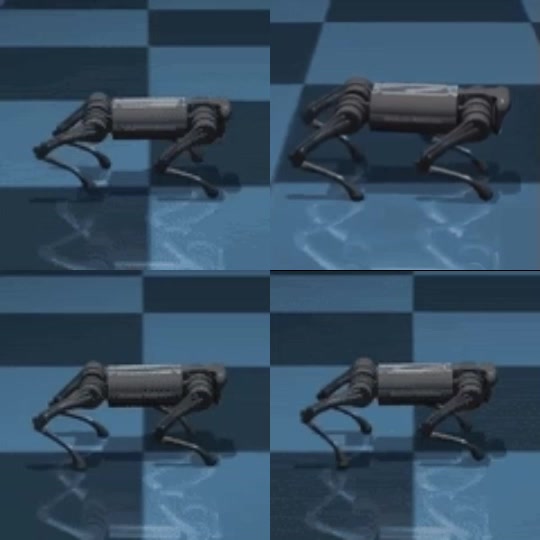
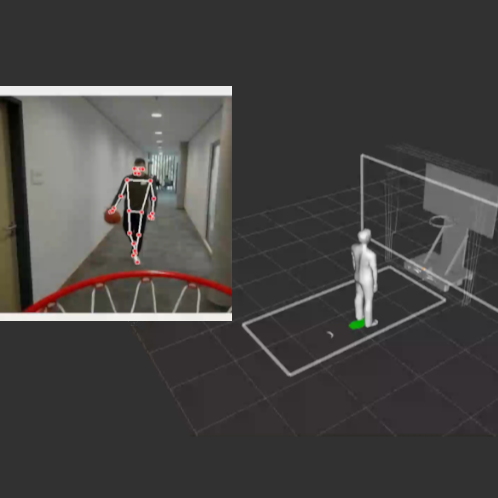
A single gait cycle of expert demonstration significantly improves achieved reward and visual appearance of the learned gait in locomotion tasks - even for transfer tasks.
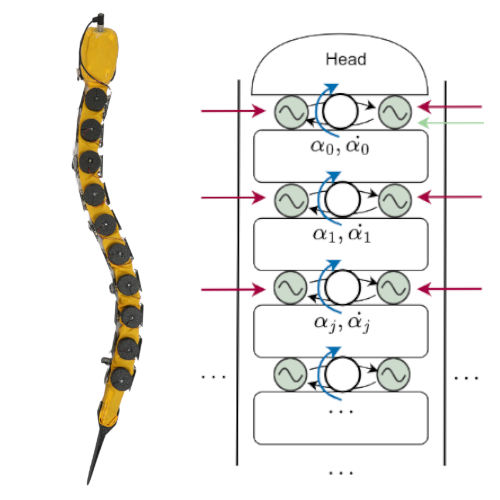
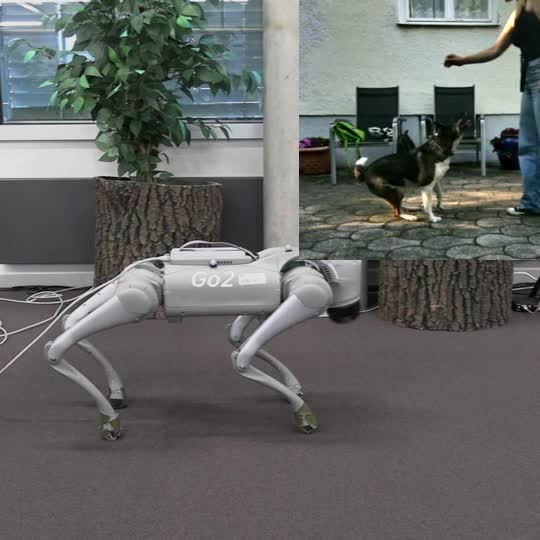
Lampreys can locomote using only based on local sensory feedback loops. Similar neural network designs show favorable properties for robot learning.
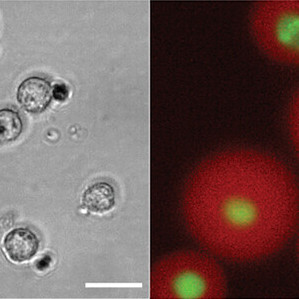
3D-printed chip for mechanoactivation at single-cell level to study intracellular calcium signaling and translocation.
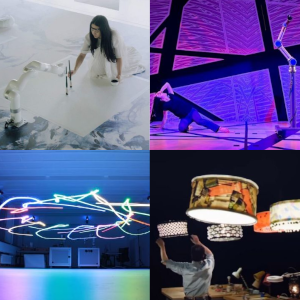
How can humans control robots more intuitively? We explore seven projects in which artists use robots through various AI-enabled human-machine interfaces.
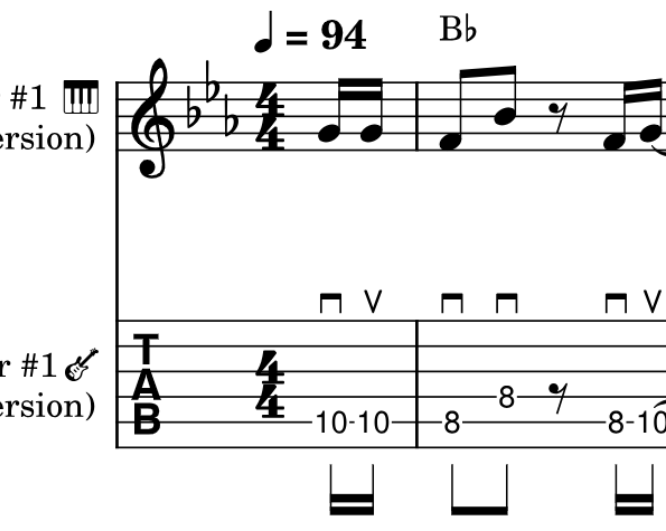
First Scores and Tabs for the Guitars in Sexual Healing on the Internet.

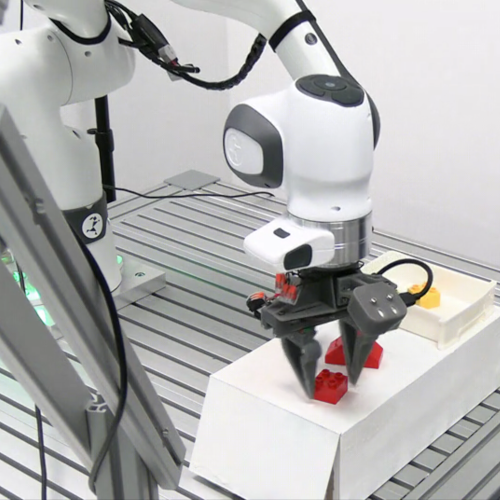
A Franka Emika FR3 robotic manipulator builds lego structures.

Teaching and studying tool for TU Dresden with 3500 users. Awarded with the german Digital Changemaker Award.

Building a robot for autonomous outdoor exploration and artifact detection

KIRO2024 was the first german AI-in-robotics conference


Check out the Huberman Lab podcast for a healthy lifestyle and science-based tools for everyday life. The Lex Fridman podcast for broadening your worldview and socially concerning topics. I like to look at DailyArt.