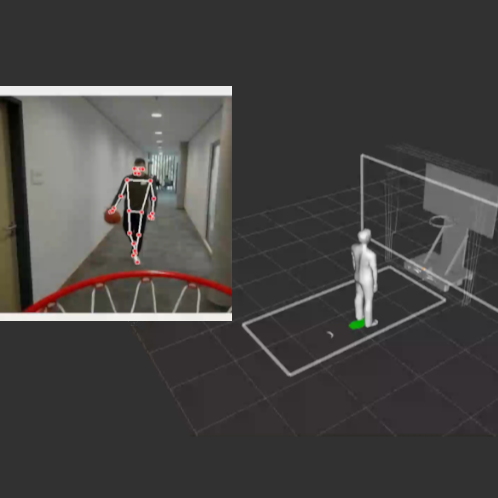
EgoHTR: Egocentric 4D Demonstrations of Human Terrain Traversal
arXiv, 2026
55 scene-aligned 4D human motion sequence dataset from egocentric wearables for training perceptive humanoid locomotion policies on challenging terrain.